Dynamics of Mobile Robots
Modelling, simulation and experimental research of mobile robot dynamics, in particular of wheeled mobile robots including modelling of road wheels slip.
The dynamics of mobile robots concerns issues related to robot motions caused by time-varying systems of forces and moments of forces.
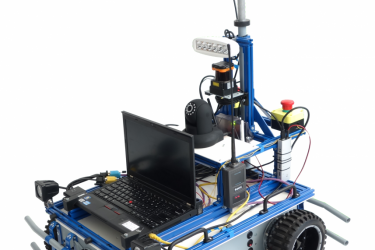
The research work carried out at the PIAP Institute is aimed at developing theoretical models of robots, that could be further be implemented in simulation environments, such as Matlab/Simulink or MSC Adams. Thanks to simulation studies robot engineer may, inter alia, optimize new designs before building a physical prototype – such method is widely used in the automotive sector. A mobile platform PIAP GRANITE equipped with a range of state-of-the-art measurement technologies is used, among others, for verifying correctness and parametric identification of developed models.
The research topics include modelling of rolling contact of special robot wheels with paved and unpaved surfaces, modelling of mobile platforms with different kinematic structures, as well as methods for model identification.
Project implementation timeframe: 06.09.2012–05.07.2015
Project net value: PLN 797,030.00
Project type: National research project
CONTACT US
DSc Eng. Maciej Trojnacki
email: mtrojnacki@piap.pl