Mobile robots dynamics
Modeling, simulation and experimental testing of mobile robots dynamics, in particular the wheeled robots, taking into account slippage of the road wheels.
Mobile robots dynamics concerns the issues related to the motion of a robot resulting from the systems of forces and moments of force, variable over time, acting on it.
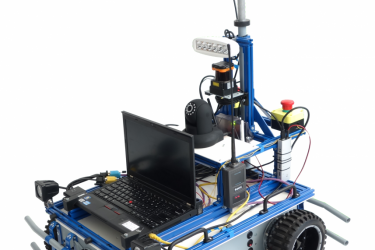
Works conducted in the PIAP Institute are targeted on development of the theoretical robot models that can be implemented in simulation environments such as Matlab / Simulink or MSC Adams. Simulation testing allows the engineer to optimise the new constructions even before building a physical prototype – this is a method commonly used in the automotive industry. Verification of correctness and parametric identification of models is carried out on i.a.: the dedicated mobile platform PIAP GRANITE equipped with a number of state-of-the-art measuring technologies.
Research topics cover the modelling of co-operation of untypical robot wheels with hardened and unhardened surfaces, modelling of mobile platforms with different kinematic structures, as well as methods of model identification.
Contact
Maciej Trojnacki, PhD. Eng.
e-mail: mtrojnacki@piap.pl