Dynamika robotów mobilnych
Modelowanie, badania symulacyjne i doświadczalne dynamiki robotów mobilnych, w szczególności robotów kołowych z uwzględnieniem poślizgu kół jezdnych.
Dynamika robotów mobilnych dotyczy zagadnień związanych z ruchem robota w wyniku działających na niego zmiennych w czasie układów sił i momentów sił.
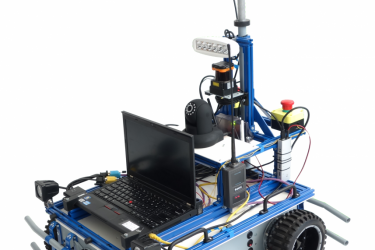
Prace prowadzone w Instytucie PIAP mają na celu opracowywanie teoretycznych modeli robotów, które następnie mogą być implementowane w środowiskach symulacyjnych, takich jak Matlab/Simulink lub MSC Adams. Badania symulacyjne pozwalają inżynierowi m.in. na przeprowadzenie optymalizacji nowych konstrukcji jeszcze przed zbudowaniem fizycznego prototypu – jest to metoda powszechnie wykorzystywana w przemyśle samochodowym. Weryfikacja poprawności oraz identyfikacja parametryczna modeli jest prowadzona m.in. na dedykowanej platformie mobilnej PIAP GRANITE wyposażonej w szereg najnowocześniejszych technologii pomiarowych.
Problematyka badawcza obejmuje modelowanie współpracy nietypowych kół robotów z podłożami utwardzonymi oraz nieutwardzonymi, modelowanie platform mobilnych o różnych strukturach kinematycznych, a także metody identyfikacji modeli.
Okres realizacji projektu: 06.09.2012–05.07.2015
Wartość projektu: 797 030 zł
Rodzaj projektu: krajowy projekt badawczy
KONTAKT
dr hab. inż. Maciej Trojnacki
e-mail: mtrojnacki@piap.pl